发表自话题:火星的中国时刻
0.引言
“着陆火星并实现巡视勘测”是天问一号的既定科学和工程目标,这就要求航天器必须具有减速着陆系统。不同于月球,火星拥有全球性大气,因此不能单独使用发动机减速,还需要气防护;但火星的大气又不够浓厚,无法紧靠大气实现安全着陆。因此,天问一号着陆巡视器采用了“气动外形减速+降落伞减速+发动机动力减速+着陆支架缓冲减速”组合减速着陆方式,但由于资料不多,本文将只介绍降落伞减速系统的研制历程与难点作简要讨论。

1.任务特点及难点
火星物理环境与地球的物理环境存在较大差异,降落伞开伞条件为超声速、低动压、低密度环境。火星探测任务的特殊性为降落伞减速系统的研制与验证带来了巨大的挑战。主要的任务特点及难点如下所述:
(1)长期深空飞行环境
降落伞减速系统需要满足18个月在轨贮存时间,这将是我国降落伞减速系统产品经历深空飞行时间最长的一次任务。在长期深空飞行中,降落伞减速系统面临长时间真空、高温贮存等环境。伞衣长期高密度包装会对降落伞使用的特纺材料的机械性能产生一定的影响,长期真空和高温有可能引起弹伞筒药剂性能变化。
(2)火星环境特殊
降落伞减速系统在火星物理环境下工作,火星大气成分以二氧化碳为主,表面大气密度约为地球的1%,表面大气压力约为地球的6%(600Pa),重力加速度约为地球的3/8(3.71m/s²)。火星大气参数随季节、地理位置均变化较大,存在尘暴等恶劣气象条件。目前国内对火星环境的了解程度仍然有限,作为主要设计依据的各种大气参数存在较大的不确定度,也不排除在研制过程中大气参数发生变化的可能。
(3)开伞条件特殊
与地球任务亚声速开伞相比,火星降落伞的开伞条件具有超声速、低动压、低密度的特点。神舟飞船返回舱降落伞开伞马赫数为0.6,开伞动压约为8000 Pa;嫦娥返回器开伞马赫数为0.45,开伞动压约为3800 Pa,而火星降落伞开伞马赫数为1.7左右,而开伞动压约为 500 Pa
超声速环境对降落伞的影响主要有以下几点:①在超声速条件下,降落伞存在复杂的激波流场形态,物伞之间气动干扰复杂,绳帆现象出现的概率增加,降落伞的开伞充气难度增大。特别是对于大型降落伞来说,绳帆和抽打现象可能导致开伞过程中伞衣破损、开伞冲击过大、充气时间延长以及非对称充气等不良后果,严重影响降落伞系统的开伞可靠性,甚至可能导致整个回收任务的失败②在超声速飞行过程中,降落伞会出现“呼吸”和高频震颤现象,易引起缝合部的剥离及伞衣的损伤③为降低绳帆现象出现的概率,使降落伞迅速通过前体的超声速尾流区,需要弹伞筒有较高的弹射速度。
 盘缝带伞充气过程
盘缝带伞充气过程低密度环境对降落伞的影响主要包括:①由于密度低,降落伞的减速效率降低,要达到同样的稳降速度,就需要更大的降落伞面积,从而增加降落伞的质量,相应地,也会增加弹伞筒的弹射质量和体积②低密度大气中,分子自由行程增大,会导致降落伞伞衣材料的有效透气量相比地球环境急剧减小,透气量降低会使降落伞的稳定性变差③由于大气密度低,着陆巡视器自身的气动减速过程比较长,在降落伞开伞时刻,着陆巡视器仍没有达到稳降阶段,具有三倍火星重力的减加速度,在进行弹射过程动力学仿真时要特别注意。
低动压条件的影响主要有:①由于动压低,伞衣内外压差建立困难,开伞变得相对困难②由于动压低,气动阻尼不足,伞衣开伞过程中还会出现甩动、“呼吸”等现象,甩动或“呼吸”的幅度会相对较大,恢复也变得相对困难。
(4)伞系减速时间短
由于火星大气稀薄, 降落伞减速效率降低, 降落伞减速过程留空时间短。通过初步弹道仿真,从降落伞弹出至降落伞与着陆平台分离,历时最短约为40s,最长约为114s(“神舟号”飞船约为800s,“嫦娥五号”约为500s),而在这短暂的时间内,需要完成弹伞、降落伞充气展开、气动减速、抛防热大底、着陆支架展开、雷达高度表测高、降落伞与着陆平台分离等多个关键动作,需要精准、合理的强时序设计。
(5)弹射降落伞质量大、速度高
火星降落伞在弹射拉直过程中,着陆巡视器仍处于减速过程中,有三倍左右火星重力加速度,降落伞需要较大的弹射速度,才能保证降落伞的可靠拉直,为降落伞的充气展开创造有利条件。
经过计算分析,弹射速度需求约为40m/s,因此弹伞筒必须实现大质量降落伞、高速弹出的要求,这势必会带来较大的推力冲击,大推力冲击对弹伞筒结构以及着陆巡视器均是不利因素;同时火星大气是低气压,与地球环境存在差异。
(6)试验验证难度大
火星降落伞的开伞处于超声速、低动压、低密度条件,火星大气声速与地球声速不同,因此在地球环境下无法对超声速、低动压、低密度进行同时模拟,只能模拟对降落伞开伞影响较大的超声速、低动压两个参数,而且必须到地球35~50km高空才能模拟,试验实施难度大。
2、正式研究工作前的摸索
早在2000年前后,北京空间机电研究所(下简称“研究所”)就瞄准我国未来行星探测的需要,开展了先期技术储备,对国外火星探测、EDL技术方案、降落伞技术、开伞控制技术、着陆缓冲技术、试验验证技术等进行了情报研究。
2011年,研究所自筹资金,开展了盘缝带伞的预先研究工作,对多种构型的盘缝带伞进行了结构设计和低速气动性能研究,开展了盘缝带伞的流固耦合数值仿真研究。
除此之外,研究所还研制了40~50kg 载荷的全向火星缓冲气囊原理样机,并成功完成 20m/s 速度的着陆缓冲试验。
 火星缓冲气囊原理样机
火星缓冲气囊原理样机2012年前后,研究所配合相关单位,开展了50kg级火星着陆探测器的论证工作,形成了系统论证报告,并开展了降落伞减速分系统和着陆缓冲分系统的原理样机产品的研制。
 2012年火星降落伞原理样机
2012年火星降落伞原理样机上级单位为了支持火星探测EDL关键技术研究,于2013年批准了北京空间机电研究所与相关单位联合提出的“小型地外天体着陆探测技术”的预研项目。在该项目中,研究所开展了伞系减速总体方案研究、自适应开伞控制方法研究、降落伞选型研究、高空开伞试验技术研究等关键技术研究。在该项目中,研究所设计了五种伞型,并进行了风洞试验研究,对每种伞型的特点进行了定量和定性分析;掌握了低速情况下降落伞仿真方法,初步探索了亚跨超声速时降落伞仿真方法,积累了仿真经验;设计了209m²降落伞的原理样机,积累了大型盘缝带伞的制造经验;掌握了自适应开伞控制方法,对各种偏差因素对开伞点散布的影响有了初步认识;提出了火箭弹平台和气球平台高空开伞试验的初步方案。
 十字伞这样奇葩的伞型也不是没试过(
十字伞这样奇葩的伞型也不是没试过(最终在2014年9月2日,北京空间机电研究所启动了我国首个火星探测降落伞减速系统工程研制工作(在2016年1月国家批复立项首次火星全球遥感与区域巡视探测任务之前)。
3、基本方案的确定
(1)降落伞级数
对于一般的地球返回式航天器来说,当其返回下降到离地球表面10km高度左右时,其下降速度然保持在200m/s左右,要从这样大的速度减速到预定的安全着速度,如果只用一具降落伞来承担,则这具降落伞的强度和质量会大到不合理的地步。
因此,将返回舱的速度由高亚声速降低到安全着陆速度,通常需要由两具降落伞来完成。首先打开一具面积较小的降落伞,称之为减速伞,将返回舱速度由每秒两百多米减小到每秒数十米,并且稳定返回器的姿态,为后续作动创造良好条件;减速伞分离后会拉开一具面积较大的主伞,将返回舱速度进一步减低到安全着陆速度。我国的返回式卫星、神舟飞船和嫦娥五号返回器,均是采用了减速伞和主伞两级减速装置。两级降落伞分布减速的方式不仅有利于减小降落伞的开伞载荷与返回器过载,而且也有利于提高降落伞减速系统的适用范围。
但在火星上又不全乎如此了……
对于火星探测器来说,为了提高进入器的气动减速特性,一般需要采用大钝头体外形。而这种气动外形的返回器,在亚(跨)声速气流中,运动一般是不稳定的,会出现大幅度的摆动、旋转,甚至翻滚。在此情况下如果有个减速伞的话,能起到稳定返回舱的作用,为主伞创造良好的开伞姿态条件,确保主伞的开伞可靠性。
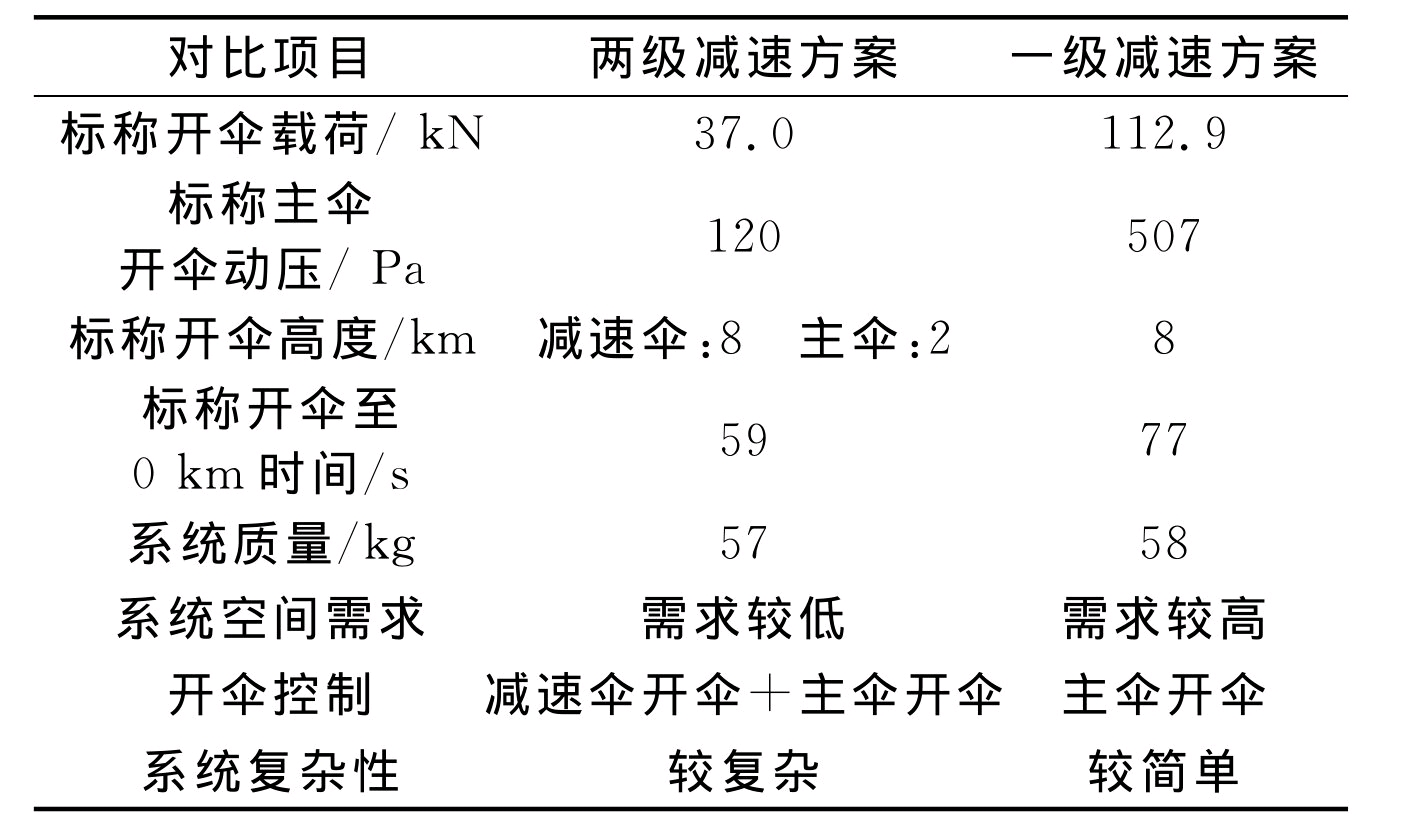 级数方案对比
级数方案对比但二级减速方案在重量方面没有优势,而且需要增加主伞开伞控制环节,留空时间也很难满足后续工作需求,还会导致主伞开伞动压过低,开伞也存在风险, 在研制途径上需要额外开展主伞研究工作,研制周期及经费均会有所增加。
一级减速方案的优势是系统简单、 工作环节少、留空时间长、开伞载荷和空间需求可接受。从系统复杂程度考虑,一级减速方案环节少,可靠度高; 拥有较长的留空时间可以为后续程序提供更大的裕度, 因此降落伞减速方案最终确定为一级减速方案。
(2)降落伞开伞方式
降落伞常用的开伞方式有弹射开伞方式和牵引开伞方式两大类,前者对应弹伞筒弹射开伞和弹伞器弹射开伞,后者对应伞舱盖牵引开伞和由前一级降落伞牵引开伞。一般对于质量较小的降落伞常采用弹射开伞方式,而对于质量较大的降落伞则采用牵引开伞方式。
 以神舟飞船返回舱为例的牵引开伞
以神舟飞船返回舱为例的牵引开伞但由于火星大气限制因素和一级减速方案的确定,出伞方式只剩下引导伞牵引开伞和弹伞筒动力开伞两种方案。
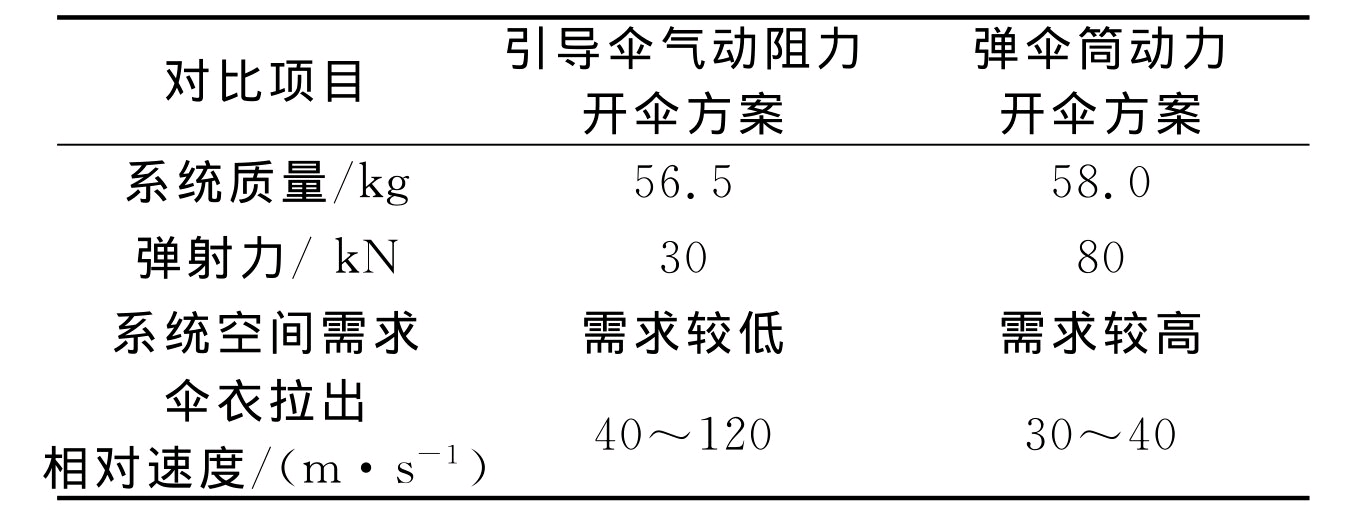 开伞方式对比
开伞方式对比引导伞气动阻力开伞方案优点是弹射力小,空间利用率较高,但是主伞拉直过程的一致性较差、开伞环节复杂,主伞开伞过程中有摩擦受损的风险。
弹伞筒动力开伞方案的优点是降落伞拉直过程一致性好,工作环节少,弹射力及空间需求可接受, 能为降落伞提供足够的初始速度,保证降落伞迅速通过尾流区并达到拉直状态。从降落伞拉直过程可靠度考虑,弹伞筒动力开伞方案伞衣拉出相对速度小,拉直过程一致性好,因此出伞方案确定为弹伞筒动力开伞方案(美国的火星降落伞减速系统到目前为止全部都是采用弹伞筒直接弹射开伞)。
 弹伞筒结构示意图,然而并不是天问同款
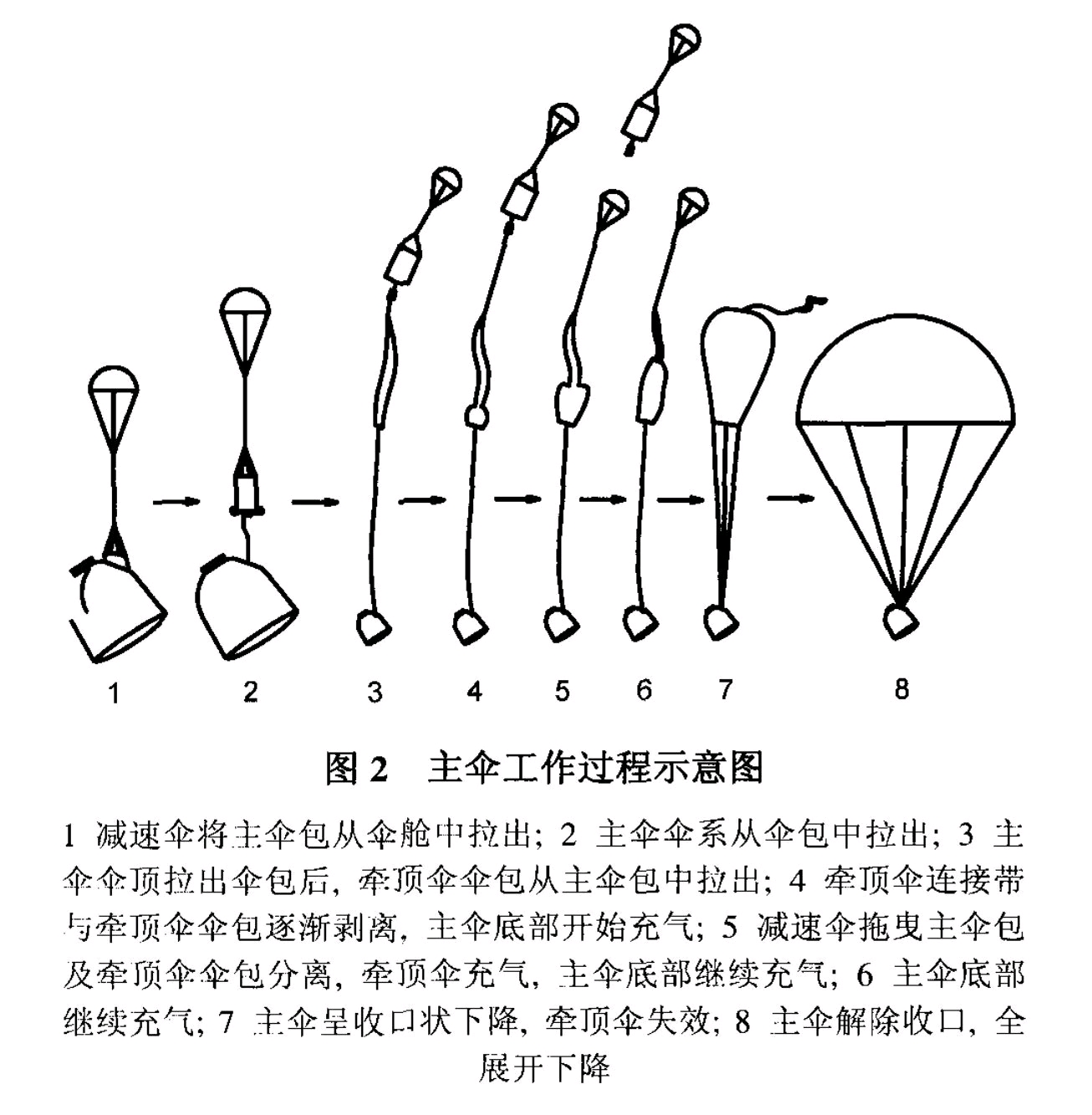
弹伞筒结构示意图,然而并不是天问同款可以看出,包好的降落伞包固定在图左侧的活塞上。点火工作时,利用药盒组件燃烧产生的高温高压燃气,解除固定约束,推动活塞做功。整个伞包以一定初速度弹射出舱后,依靠其活塞和伞包自身的惯性力依次拉出连接带—伞绳—伞衣的倒拉开伞。
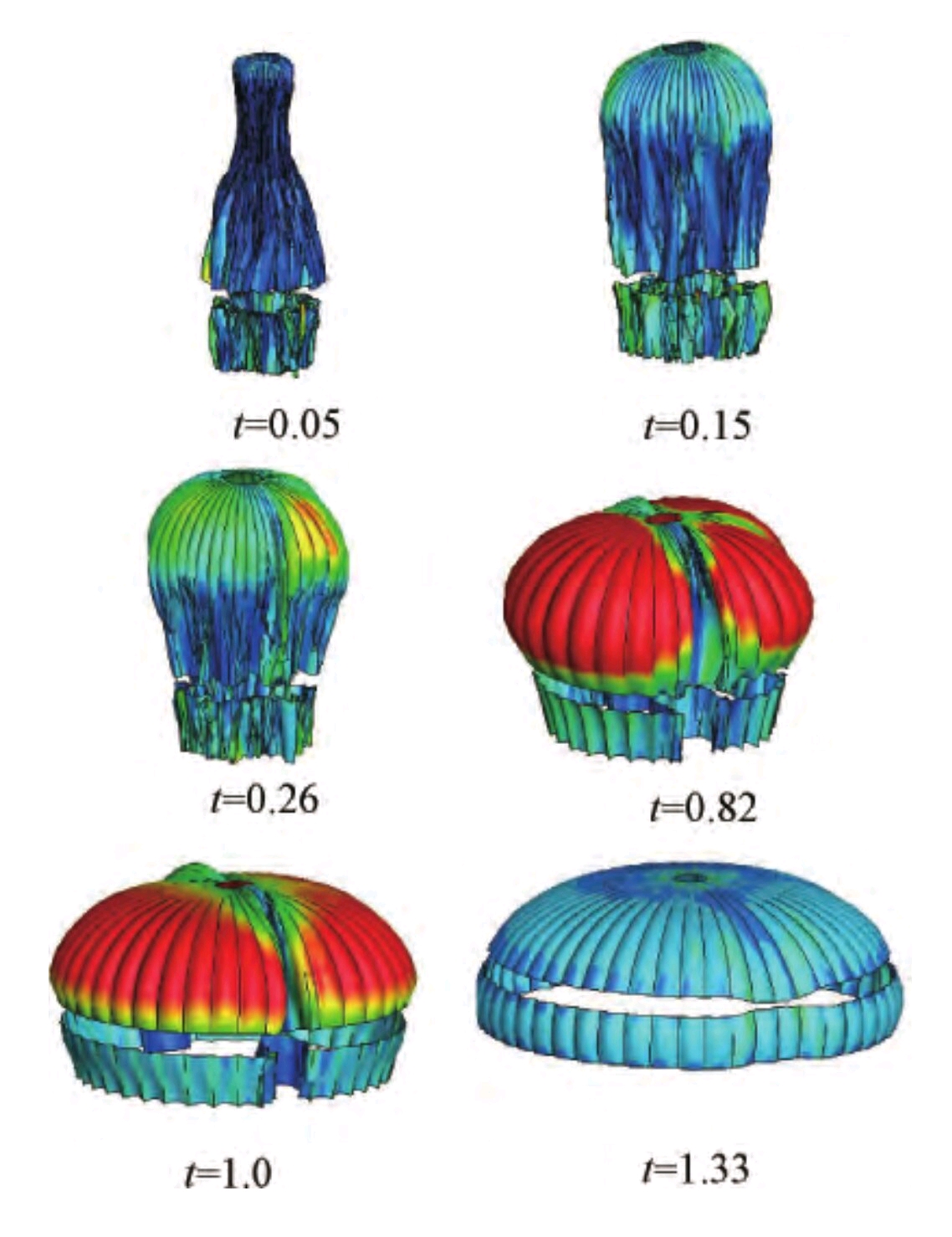
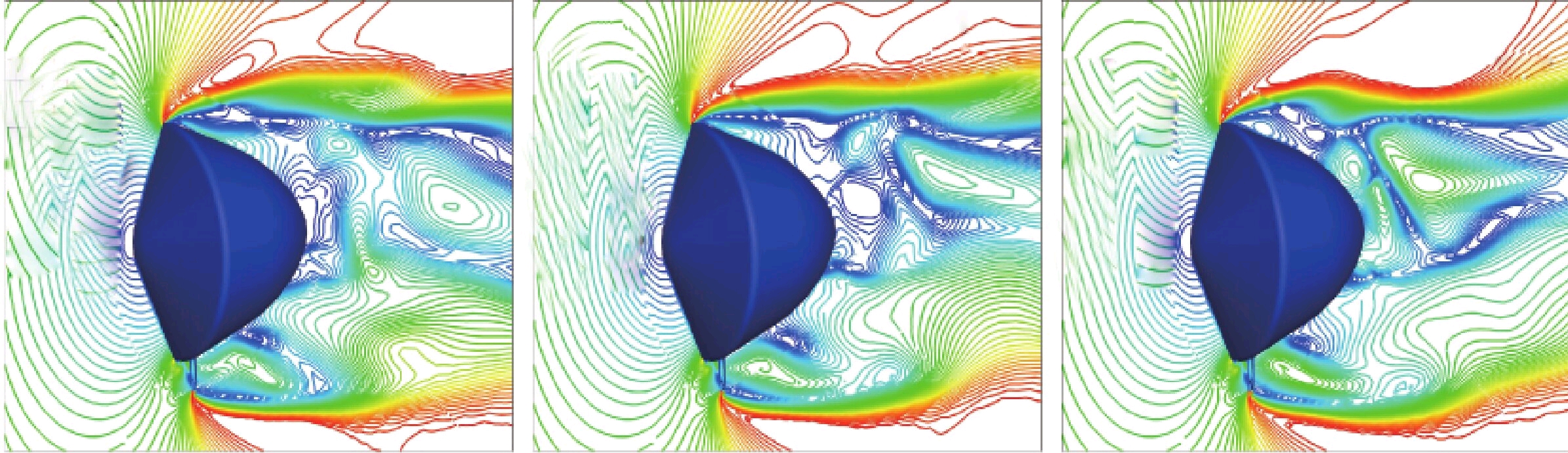
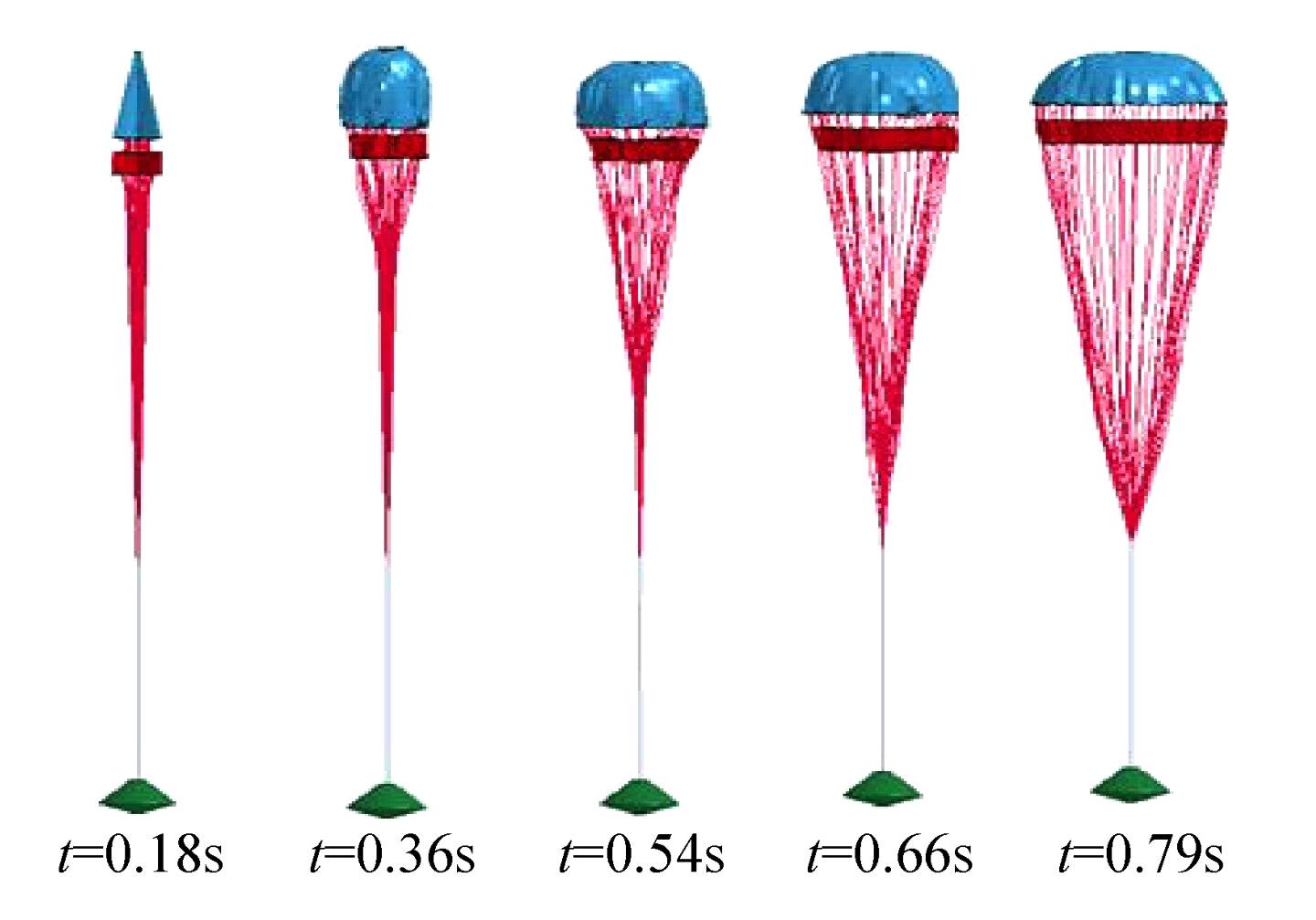 Ma=1.2时,降落伞充气过程
Ma=1.2时,降落伞充气过程较典型倒拉开伞过程为:弹伞筒将主伞包整体推出伞舱,在主伞包被拉出伞舱一定距离后,即伞包外的吊带拉直后,解除主伞包封包;然后随着伞包和返回器相对距离的增大,先后有序地拉出伞绳和伞衣,最后拉断连接伞衣顶部和伞包底部的拉断绳,主伞系全部拉直。
 倒拉开伞,区别于正拉法
倒拉开伞,区别于正拉法(3)伞型选择
本来有许多种伞型可选,但火星上能用的就两种——环帆伞和盘缝带伞。但国外完全成功的任务使用的都是盘缝带伞,而且我国没有研制超声速环帆伞的经验,因此最终轻松确定伞型为盘缝带伞。
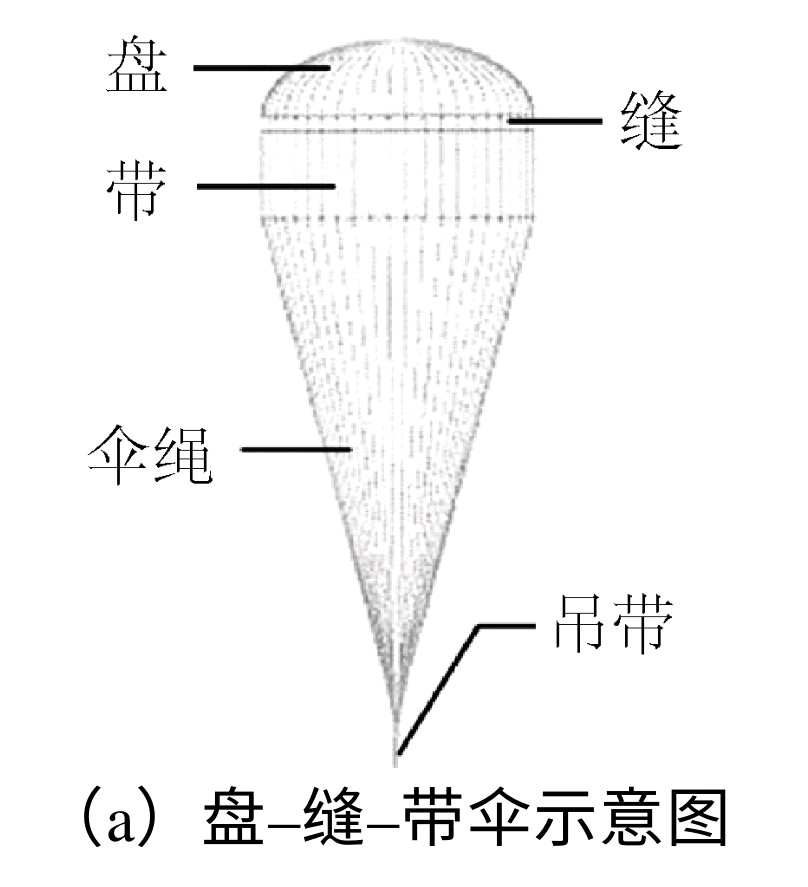 盘缝带伞示意图
盘缝带伞示意图 环帆伞
环帆伞(4)开伞控制方式
一般开伞时机的选择主要是根据任务的需求或航天器飞行弹道来确定的,需要综合考虑开伞高度、开伞动压、开伞马赫数、开伞姿态等几个方面的因素,这就要求开伞控制装置有自行权衡取舍的能力。
主要开伞控制方式有:
1)纯时间控制法
2)过载—时间控制法
3)压力高度控制法
4)雷达高度控制法
5)自适应过载控制法
目前研究结果表明前四种控制方式都难以完全满足开伞条件,而以动压作为开伞控制参数(自适应过载控制法)能较好解决问题。
由于对火星大气环境的认识程度有限,分布规律也不是很清楚,而且直接通过压力传感器来测量探测器进入过程中的压力,实现起来也相当困难。通过对进入弹道参数的分析,可知动压和过载之间其实存在着很好的对应关系。因此,可以通过过载的变化关系来间接反映动压的变化情况,这样就避免了直接获取动压所存在的技术问题,而且过载的获取简单且成熟。
自适应过载控制方法的开伞控制最终通过以下方法来实现:对各种进入轨道的计算分析可知——各进入轨道中过载随时间变化的规律是不一样的。而每个进入轨道又对应着不同的最佳开伞点,那么我们只需测定现实进入过程中过载与时间的变化规律,通过它找到对应的进入轨道,再通过这条进入轨道,就可以知道我们最需要的开伞时间辣~
(与将开伞时间t与过载g₂间的函数关系事先装入减速着陆系统的程序控制器中,并通过设定过载值g₁来启动减速着陆系统的程序控制器。启动后,程序控制器开始计时并通过计算获取一定时间后的过载值g₂,通过事先设定的开伞时间与过载的关系,程序控制器就会发出开伞指令。)翻译后的版本在上面,大家不必对着这段晦涩的文字劳神苦思了(
在传统的过载-时间控制法中,探测器进入时的过载达到一定值后启动减速着陆系统,在事先装订的固定时间后开伞。由于火星大气环境的影响,在火星探测减速着陆过程中,难以找到一个固定的时间程序来满足不同的进入轨道。
而自适应过载控制法实际是在某一固定动压附近控制开伞,其现原理是通过动压和过载、及其与时间之间的相互关系来实现的,对于不同的进入弹道其开伞时间是不同的,而开伞时的过载或开伞动压是基本相同的。
4、研制与试验历程
降落伞试验方法可分为风洞试验、低高度空投试验和高空发射试验。
在风洞试验中,主要考察了降落伞的几何透气量、物伞间的相对距离、马赫数对其阻力特性的影响。
空投试验的主要目的是验证降落伞的结构强度、系统的工作时序以及系统的工作性能。由于在火星着陆过程中,降落伞处于低密度、高速度的条件下,开伞峰值载荷将在伞衣完全充满的时刻出现。而在地球上的空投过程中, 试验的投放高度仅约为 15 km,大气密度太大,这导致降落伞的开伞峰值载荷将不再出现在伞衣完全张满的时刻,从而使得空投试验中伞衣的应力分布将与火星着陆过程中的实际情况不同。因此为了更好地模拟降落伞受力情况,试验过程中采用调整回收物的质量和开伞时间的方法(我国确定了采用直升机投放的方案作为降落伞强度试验方案,且试验已经获得圆满成功)
高空发射试验(下文将重点介绍)的主要技术途径有两个——浮空气球平台和探空火箭平台。此时降落伞的工作高度在 35~50km 左右,符合了前文提到的火星低密度、低动压和超声速的工况。因此这种方法能全面验证演示整个降落伞减速系统:验证弹伞筒是否具有足够的弹射速度确保降落伞全部展开,验证降落伞的开伞程序,验证降落伞的阻力特性,验证系统的稳定性等。
(1)试验环境
大气物理参数中大气密度以及大气温度对降落伞工作有重要影响,这两个参数直接关系到降落伞减速系统工作时的飞行马赫数和飞行动压等参数。火星大气密度远低于地球大气密度,在地球 35km 区域大气密度与火星大气密度量级相当。火星大气温度大幅低于地球大气温度,导致火星大气声速与地球大气声速有较大区别,在地球35km 区域的大气声速为 310m/s,而火星表面大气声速仅为 223m/s。这导致在准确模拟飞行马赫数后,由于大气声速的不同,地球高空开伞试验模型的飞行速度约为火星探测器飞行速度的 1.4 倍,为降落伞拉直过程提高了难度。
(2)浮空气球平台
 气球平台试验过程
气球平台试验过程气球平台高空开伞试验方案是通过氦气球将试验模型运至离地球表面 35~50km 高空, 试验模型释放自由下落一定安全距离后,加速发动机点火对试验模型进行短时加速,而后试验模型惯性飞行,当试验模型速度及高度满足试验条件时,弹出降落伞进行超声速、低密度、低动压条件下的性能验证。
(3)探空火箭平台
经过试验方案设计及国内相关技术调研研究,国内探空火箭技术比较成熟。气球平台高空开伞试验方案试验模型可以模拟探测器的气动外形,但是该方案系统复杂,氦气球及试验模型系统均需要新研制,国内未展过类似试验项目,涉及多项新技术,试验成本高。而探空火箭平台高空开伞试验方案可以利用成熟的探空火箭技术,技术成熟度高,试验成本相对较低。根据综合比较结果,火星探测项目降落伞性能试验验证最终采用探空火箭平台高空开伞试验方案。
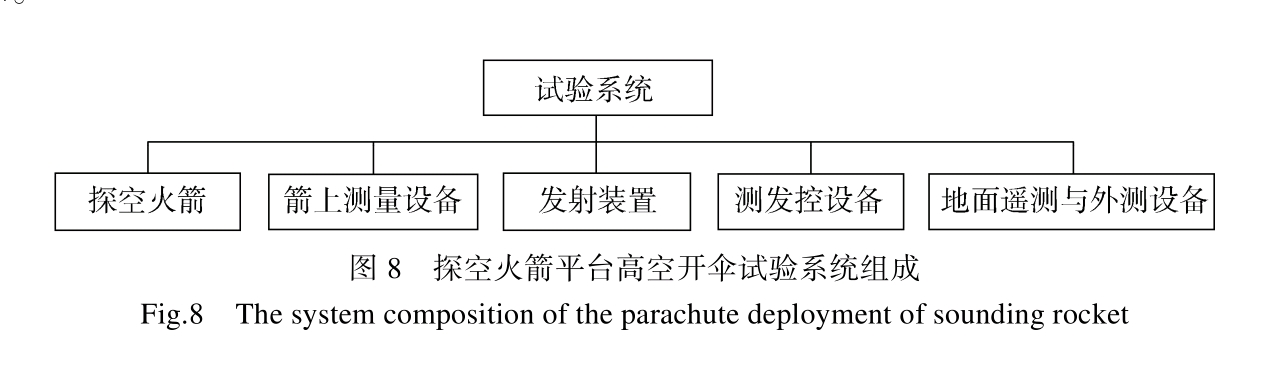 系统组成
系统组成试验系统由探空火箭、箭上测量设备、发射装置、测发控设备、地面遥测与外测设备组成。探空火箭采用固体发动机作为动力源,由箭体结构、动力系统、控制系统、电气系统、遥测设备等组成。火箭总长10m,直径 750mm,起飞质量 5t。箭上测量设备由 2 个加速度传感器、4 个拉力传感器、2 套高清摄像机和 2 套图像记录器组成,用于测量降落伞工作的力学环境,获取降落伞弹伞及开伞过程图像。发射装置是探空火箭发射时的支撑与导向机构,用于探空火箭的起竖、回转及定位定向。地面遥测与外测设备由遥测地面接收站、光电经纬仪、雷达等组成,遥测地面接收站用于完成探空火箭飞行过程中箭上遥测信号的接收、存储和处理, 光电经纬仪及雷达用于探空火箭飞行过程外弹道测量。
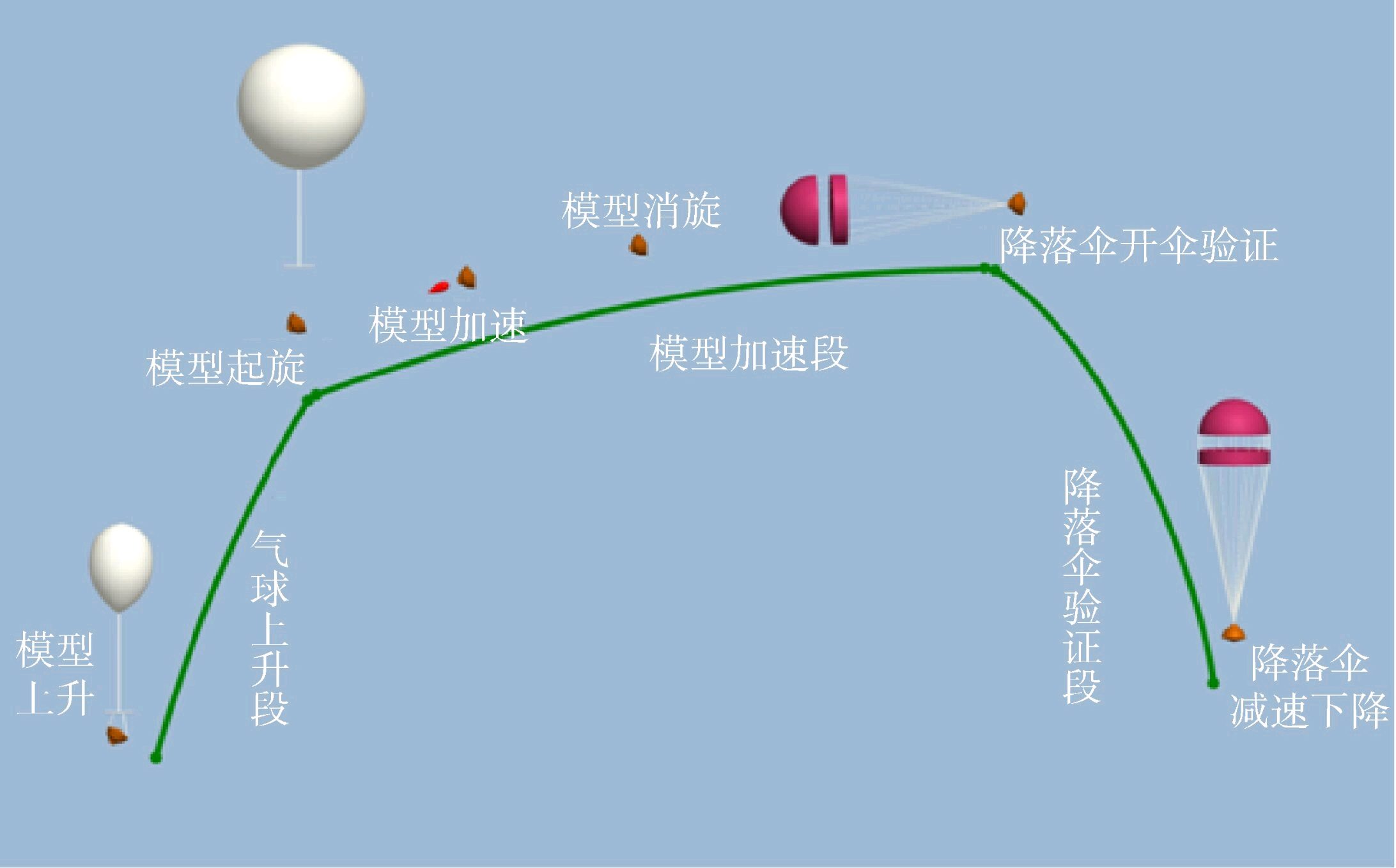
 探空火箭平台试验过程
探空火箭平台试验过程试验系统工作过程如图所示,每次试验前将降落伞开伞马赫数、动压等信息装定至探空火箭控制系统,探空火箭点火后按照设计弹道飞行,65s 左右达到头体分离条件,箭头与箭体分离,装有降落伞减速系统的箭头继续向上飞行,并实时判断飞行马赫数与动压,当满足开伞条件时(80s 左右) ,弹出降落伞,对超声速、低动压条件下对降落伞减速系统工作性能进行验证,最终降落伞携带箭头着陆。在此过程中通过图像测量设备、拉力传感器等对降落伞开伞过程、开伞载荷等关键信息进行记录。
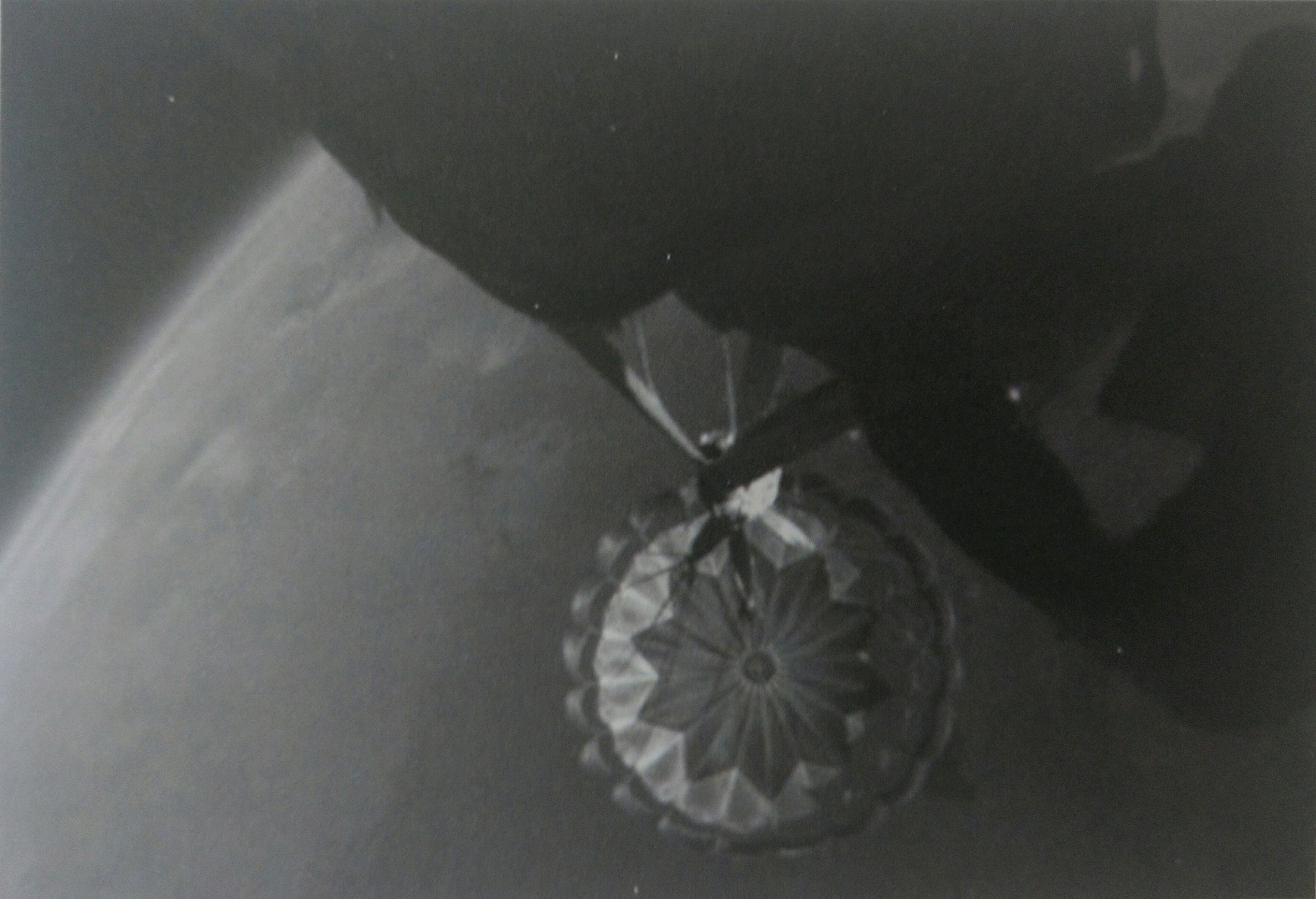 “图像记录器”拍摄的开伞后图像
“图像记录器”拍摄的开伞后图像(4)时间节点
2016年4月,研究所完成了降落伞减速系统方案阶段研制工作;在方案研制阶段,对降落伞减速系统进行了缩比降落伞高空开伞试验。
试验第一阶段飞行试验于2016年8月17日—9月25日进行,试验飞行了三个架次,获取了全部试验数据,降落伞正常充气展开,试验取得了成功。第二阶段试验于2017年5月27日—6月9日进行。试验共飞行两个架次,获得了全部试验数据,试验取得了圆满成功。
钞一段报道在这里罢
科技日报北京(2016年) 9 月 3 日电
记者 3 日从中国航天科技集团公司四院获悉,在近日开展的缩比火星探测降落伞火箭弹高空开伞首发试验中,该院研制的新型天鹰探空火箭将试验降落伞运送至指定空域并成功打开,力助试验任务圆满成功。
缩比试验验证了分系统方案设计的正确性,获取了模拟火星开伞条件下的缩比降落伞试验数据,为初样设计提供了有力支持。
2016年7月,研究所完成了降落伞减速系统初样设计。在初样研制阶段,进行了全尺寸降落伞高空开伞试验,使用的是鉴定状态的分系统产品,模拟全尺寸火星降落伞超声速低密度、低动压的开伞条件,验证全尺寸火星降落伞的功能和性能。
全尺寸降落伞高空开伞试验于2018年3月26日-4月28日进行,实际飞行四次,试验获取了全部试验数据,取得了圆满成功。
全尺寸降落伞高空开伞试验验证了鉴定状态降落伞减速系统产品的功能性能,为顺利转入正样研制阶段打下了坚实的基础。
降落伞减速系统初样阶段共规划了专项试验35项(其中分系统专项试验7项,单机级/组件级试验项目11项,部件级/材料级试验项目17项)
截至2018年8月,正在开展降落伞减速系统初样研制工作,已经完成了初样电性件、结构热控件的研制,完成了大部分初样研制试验、鉴定件设计,开展了正样产品设计与物资采购工作,完成了降落伞强度空投试验。目前正在开展正样研制工作。降落伞减速系统能够完成初样阶段研制任务,转入正样工程研制阶段。目前,降落伞减速系统各产品的技术状态已经确定,功能性能全面满足总体指标要求。
5、忽然想到
为了确保降落伞开伞的可靠性,开伞时尽量选择进入器姿态比较平稳的阶段,同时尽量避免逆气流方向开伞,这样一方面有利于弹盖开伞的设计,另一方面也有利于降落伞拉直、充气工作的可靠性。
特别是在进行火星探测器减速着陆系统设计时,必须将开伞时的攻角严格限定在较小的范围内。由于火星上降落伞的开伞是处于超声速、低动压、低密度的状态下,而且一般是采用直接弹射主伞的方式,研究表明开伞攻角对火星降落伞拉直过程中的绳帆现象起着决定性影响,直接决定了是否发生绳帆现象。而绳帆现象则对降落伞的拉直开伞过程较为不利,容易引起抽鞭、假顶和非对称充气等后果,严重时可能进一步导致降落伞系统的工作失效。
 “好奇号分离6个质量配置块
“好奇号分离6个质量配置块美国在火星探测用降落伞的研制过程中,模拟火星低密度降落伞开伞试验时就曾多次出现过降落伞开伞失败的情况,并在一系列火星探测器的研制工作中对开伞攻角均给予了高度重视,对开伞攻角给出了明确的要求(一般均要求开伞攻角不能大于13°),甚至NASA在“火星科学实验室”探测器设计中,由于在进入过程中采用了半弹道式进入,存在一个约15°的配平攻角,为了确保开伞的可靠性,将开伞时进入器的攻角降至接近于零。为此,不惜增加系统重量,特意设计了6个质量配重块,在降落伞开伞前15s,通过依次分离进入器内部的6个质量块,改变进入器的质心位置。
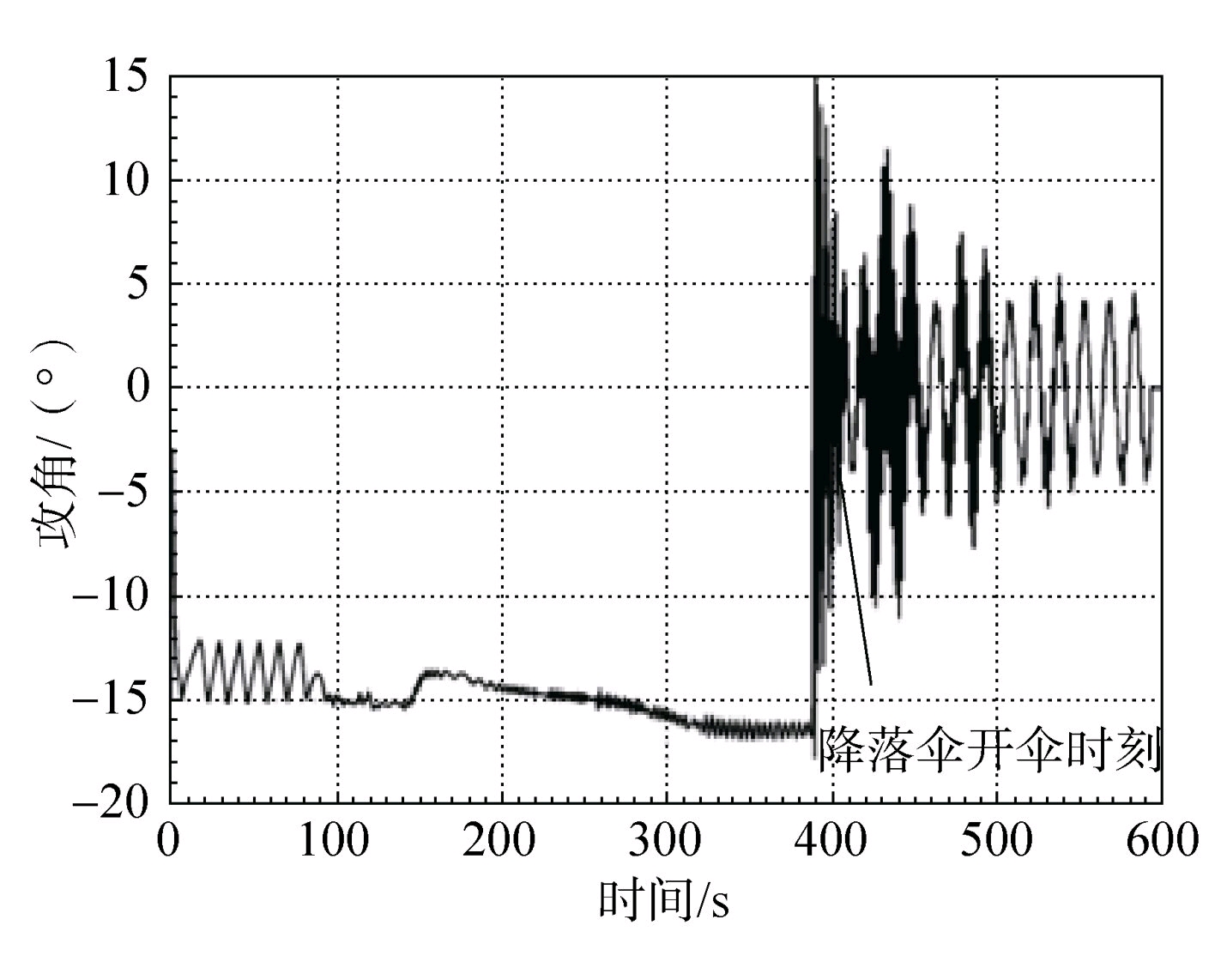 “好奇号”进入器攻角变化情况
“好奇号”进入器攻角变化情况可以看出,在400s左右,攻角突然降至零附近
6、后记
这篇专栏本应收在“每周天问”系列动态的,但后来越写越多,动态竟装不下了,这才改为专栏。再一想,降落伞这样复杂的系统,研制起来应是颇费周折的,干脆多写点,最终造成了“字数众多”的局面
 写到这发现没有图作封面了,于是胡乱从论文里扣了一张(
写到这发现没有图作封面了,于是胡乱从论文里扣了一张(标签组:[地球质量] [火星卫星] [火星大气] [地球环境] [飞行高度] [降落伞] [杂谈] [马赫数] [控制环境] [高空飞行]